Here are some of my main research interests.
To discover more, read my papers! Full texts are available here.
You can also read my interview with the IEEE Control Systems Magazine in the column People in Control.
Here are some of my main research interests.
You can also read my interview with the IEEE Control Systems Magazine in the column People in Control.
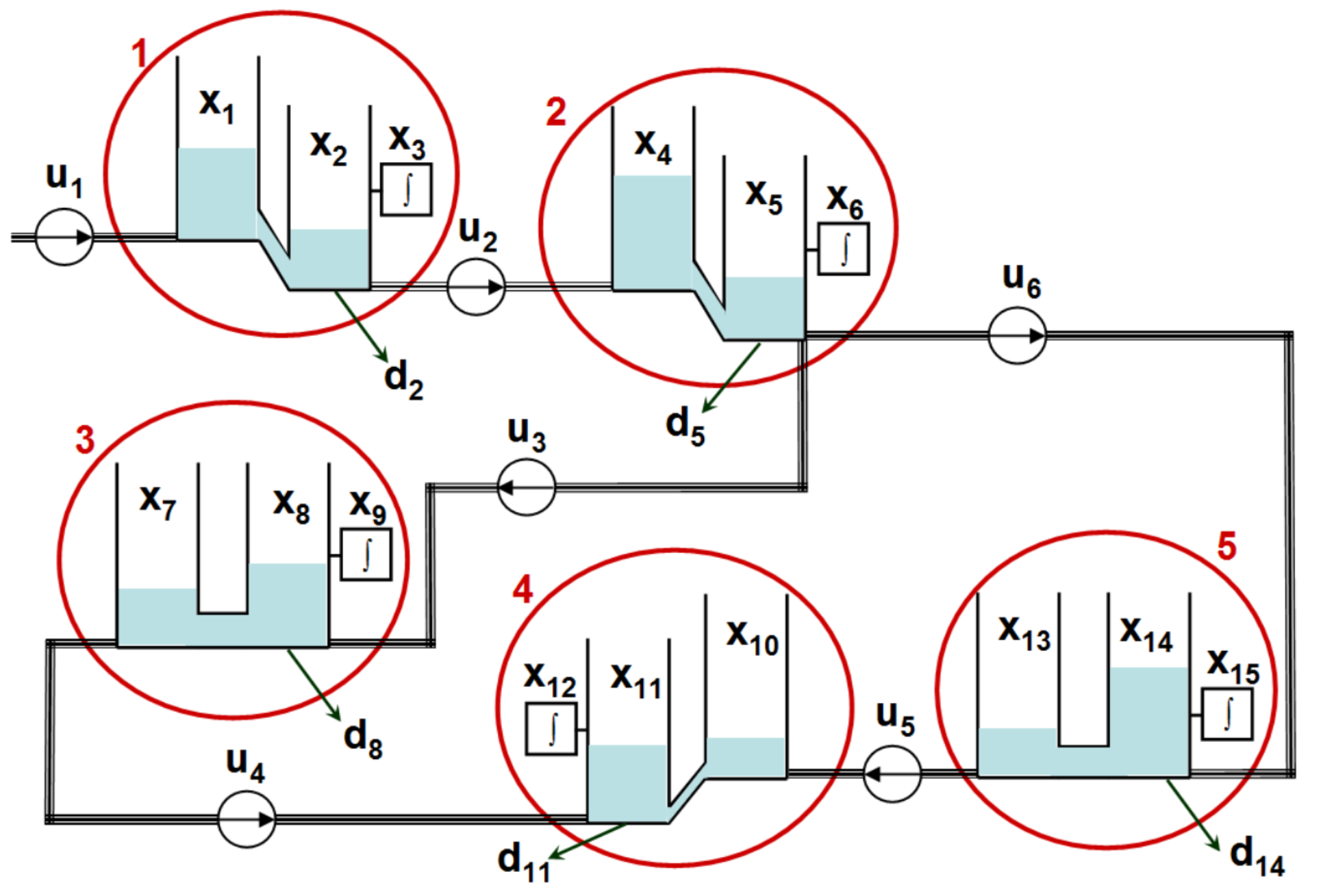
Complex interconnections of interacting agents, each with its own dynamics, are ubiquitous in our daily life. We are part of social and economic networks, we use technological networks (power, transportation, telecommunication, computer networks), our organisms rely on extremely complex interactions of DNA, proteins and biomolecules (biochemical reaction networks, gene regulatory and metabolic networks, signalling pathways). Multi-agent robotics is also arising, aimed at employing swarms of robots, drones or unmanned aerial vehicles to perform critical collaborative tasks (cooperative manipulation and transportation, including human-robot interaction; patrolling; search and rescue).
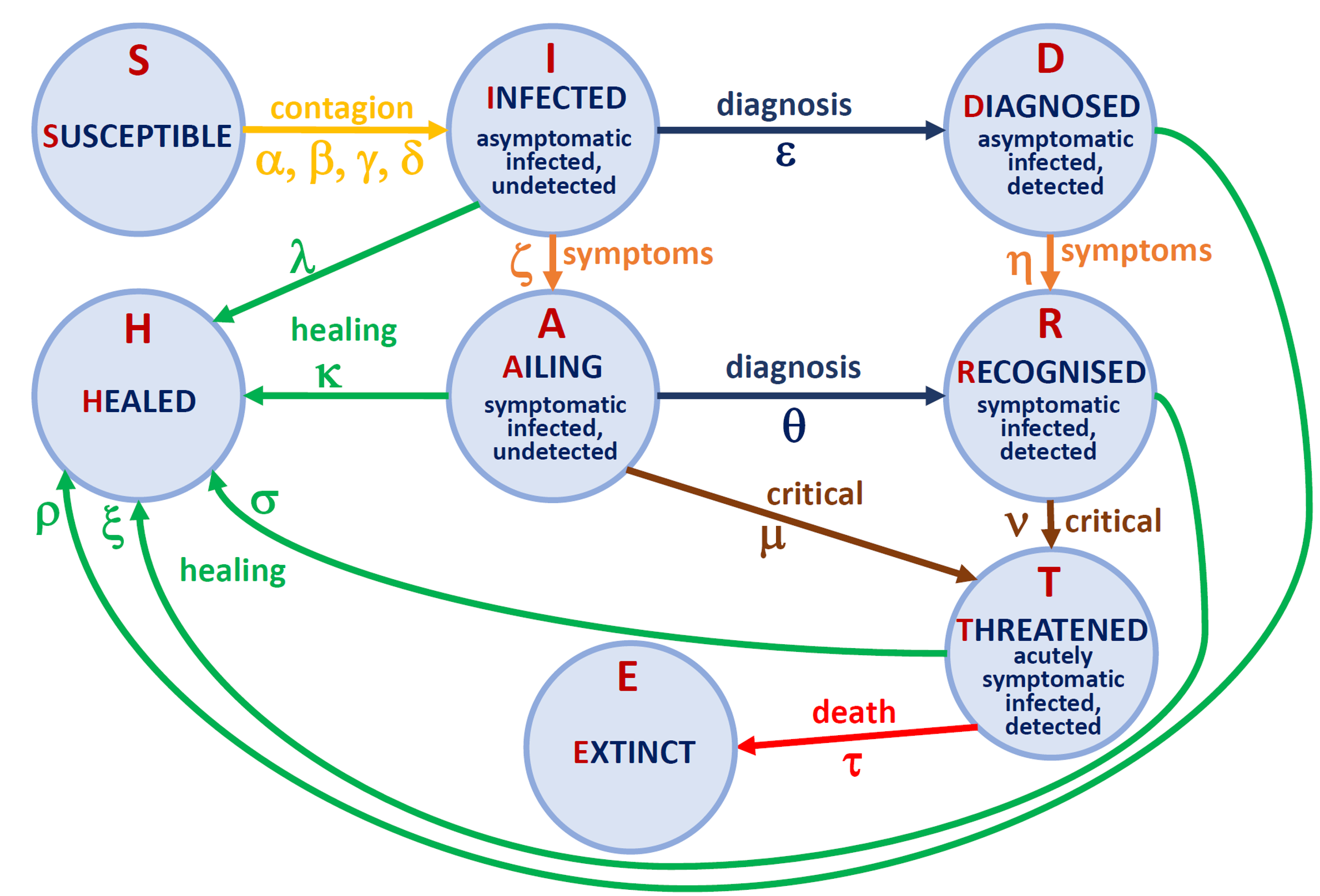
Each of these systems can be modelled as a dynamical network: a complex dynamical system endowed with a network structure, composed of several dynamical sub-units that are interconnected according to a (possibly time-varying) network topology. This general class of models embraces natural and engineered complex systems, and is thus relevant in systems biology, social networks, ICT, autonomous systems and multi-agent robotics.
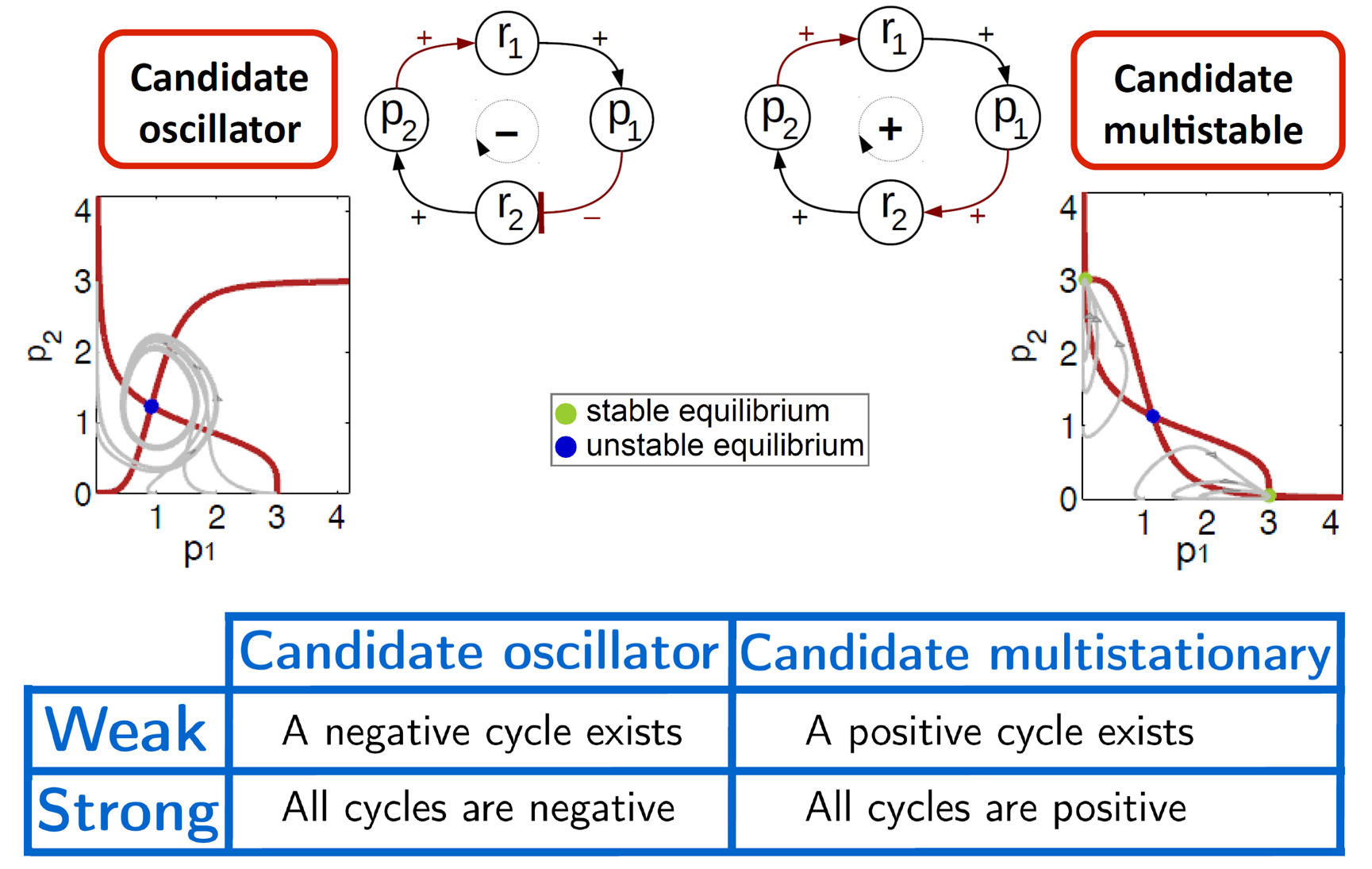
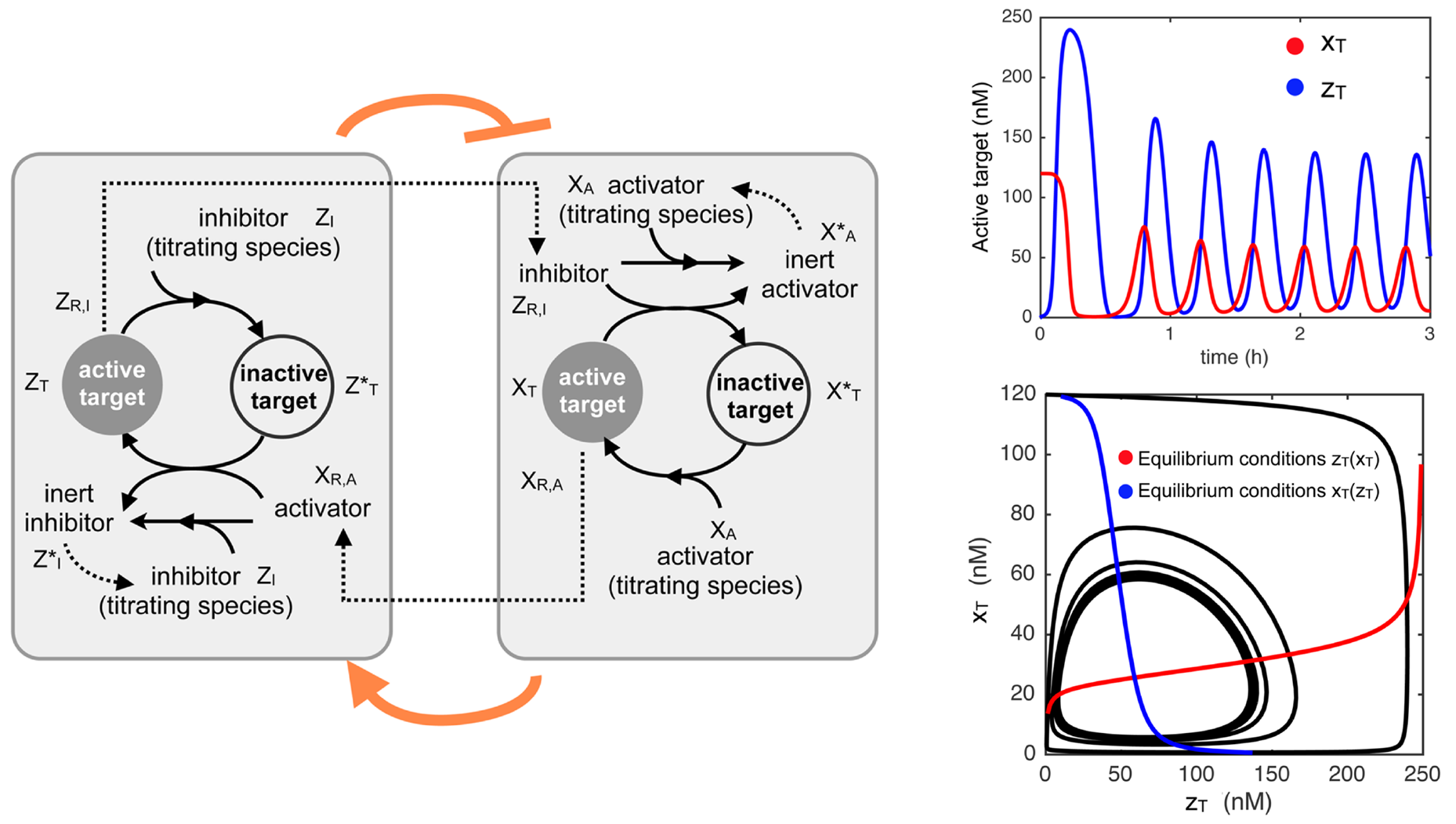
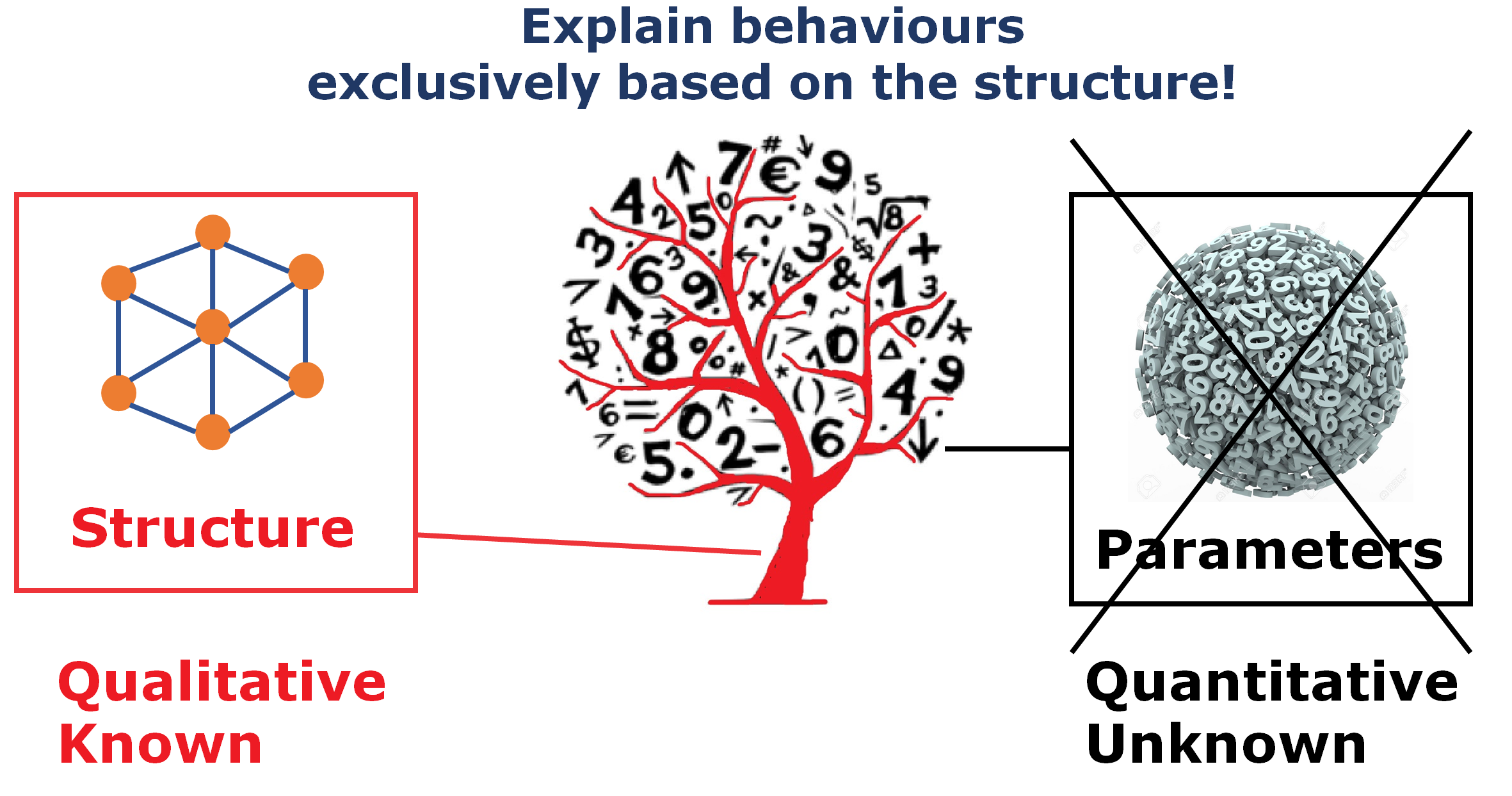
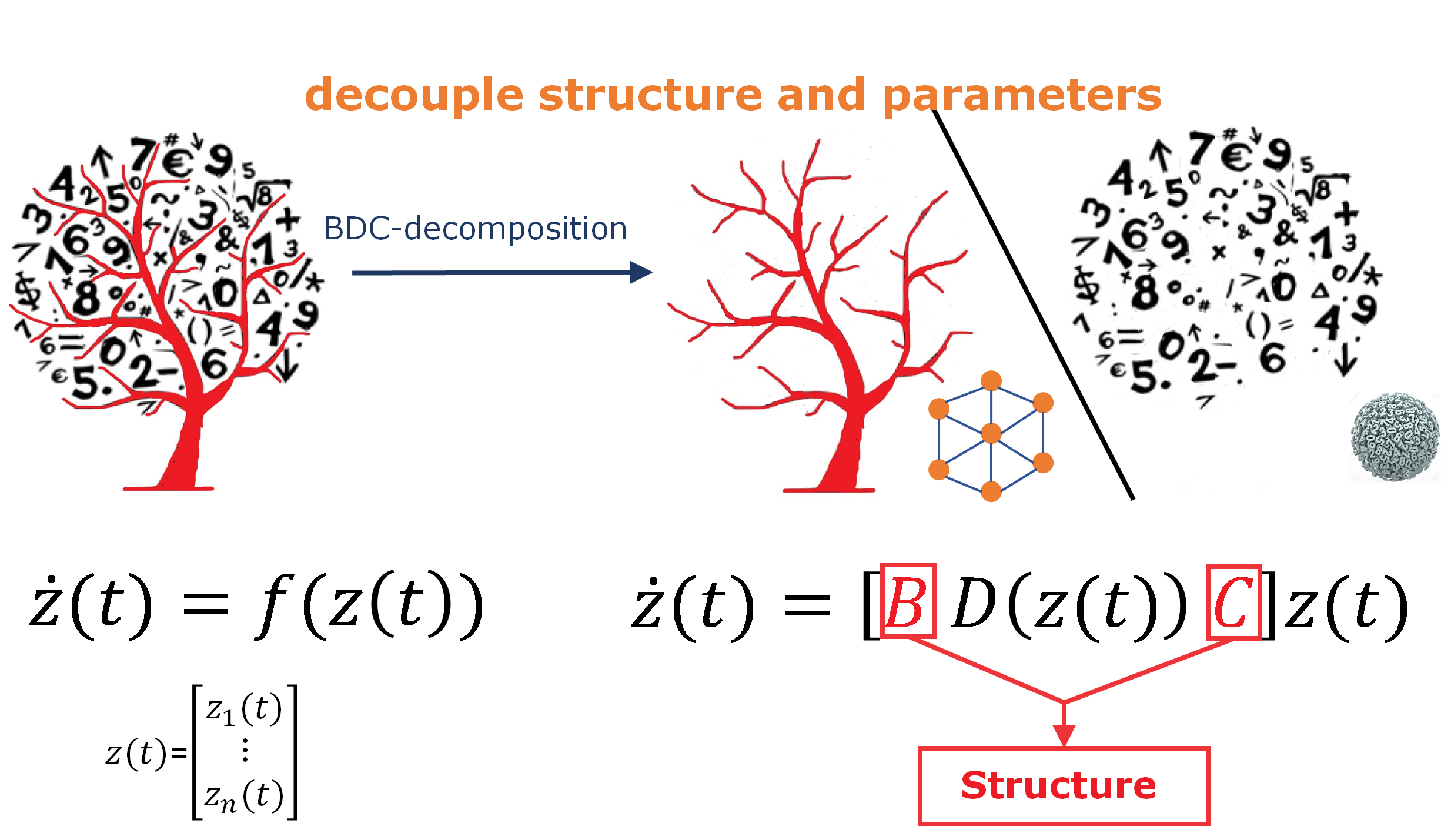
Structural (parameter-free) methods are particularly useful to deal with networked systems whose parameter values (and functional expressions, due to modelling choices) are varying, uncertain or unknown. Can a class of systems necessarily give rise to a particular qualitative behaviour, regardless of specific parameter values? Quite surprisingly, this is indeed the case for many natural systems: this reveals how the design principles selected by evolution have rooted specific qualitative behaviours (associated with specific motifs) in the system structure, allowing living cells, organs and organisms to robustly perform their task in spite of severe uncertainties, noise and environmental fluctuations. The main goal is to explain how dynamical networks in nature can ensure a global qualitative behaviour that exhibits an extraordinary robustness in spite of huge parameter variations and uncertainty. Structural analysis allows us to identify properties that pertain to a whole class of dynamical networks, due to its inherent structure.
When we manage complex large-scale engineered systems, our aim is to control or coordinate the overall system so as to achieve the desired global behaviour, even though we have limited local information and we can enforce local actions only.
As nature often adopts distributed strategies, so distributed approaches are fundamental when dealing with complex engineered networks. Distributed optimisation and estimation algorithms are fundamental in sensor networks, localisation problems, synchronisation and coordination of autonomous agents. The decentralised control of dynamical networks is crucial for applications spanning from traffic congestion problems, supply chains and inventory management to water and energy distribution, formation control and collision avoidance, coordination of robots and autonomous vehicles, power networks and smart grids, telecommunications, computer and mobile phone networks. These distributed strategies need to robustly face delays, saturations, topology changes, failures and unpredictable events. The main goal is to design network-decentralised control and estimation strategies for dynamical networks that enforce a global behaviour through local actions.